How it works

The operating principles of the Synchro-Self-Shifting Clutch

When the input shaft and sliding component reach the same speed as the output, they rotate until a ratchet tooth contacts the tip of a pawl on the output clutch ring this prevents further rotation of the sliding component relative to the output clutch ring (position shown).
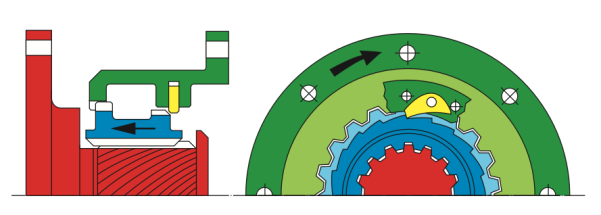
As the input shaft continues to rotate, the sliding component will move axially along the helical splines of the input shaft. When a ratchet tooth is in contact with a pawl tip, the clutch engaging teeth are perfectly aligned for engagement and thus will pass smoothly into mesh in a straight line path.
As the sliding component moves along the input shaft, the pawl passes out of contact with the ratchet tooth, allowing the clutch teeth to come into flank contact and continue the engaging travel. Note that the only load on the pawl is that required to shift the lightweight sliding component along the helical splines.
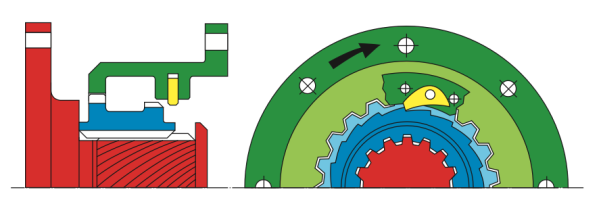
Driving torque from the input shaft will only be transmitted when the sliding component completes its travel by contacting an end stop on the input shaft, with the clutch teeth fully engaged and pawls unloaded.
When a nut is screwed against the head of a bolt, no external thrust is produced. Similarly when the sliding component of an SSS Clutch reaches its end stop and the clutch is transmitting driving torque, no external thrust loads are produced by the helical splines.
If the speed of the input shaft is reduced relative to the output shaft, the torque on the helical splines will reverse. This causes the sliding component to return to the disengaged position and the clutch will overrun.
The SSS Clutch can continuously operate engaged or overrunning at maximum speed without wear occurring.
At high overrunning speeds, pawl ratcheting is prevented by a combination of centrifugal and hydrobodynamic effects acting on the pawls.
Where necessary, an oil dashpot is incorporated in the end stop to cushion the clutch engagement.